 |
|||
|
|
|||
| ||||||||||
|
|  MIL-C-38418E(AS)
3.6.7
Directional Gyro Leveling - The inner gimbal shall be
precessed by means of the leveling torquer controlled by a suitable
non-pendulous sensor so that the spin axis of the directional gyro is
perpendicular to the azimuth axis within 1/4. This leveling torquer
shall have a rate that will level the gyro--within 30 seconds after power
is applied.
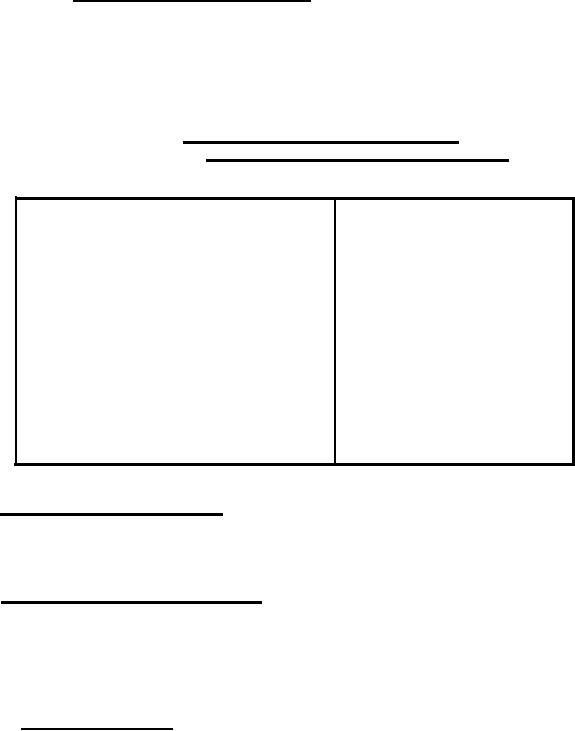
TABLE II.
Displacement Gyroscope Synchros
Nominal Electrical Characteristics
Internal excitation
26V A, 400 Hz
Input current
80 mA
Input power
O.44w
Output voltage (max)
11.8V
Sensitivity (no load)
206 mV per deg
7.50
Phase shift (no load)
dc rotor resistance
43 ohms
dc stator resistance
30 ohms
Impedance
Zro = 69 + j318 ohmS
Impedance
Zso = 28 + j55 ohms
Impedance
Zrss = 142 + j53 ohmS
Maximum null
50 mV
Accuracy (max error spread)
14 minutes
3.6.8 Directional Gyro Slaving - The directional gyro shall be precessed
about its azimuth axis to an external azimuth signal by means of the
azimuth torquer.
The normal slaving rate shall be 10 to 20 per
minute.
3.6.9 Azimuth Transmitting Synchro - One transmitting synchro shall be
mounted on the azimuth axis of freedom.
The synchro shall provide
displacement signals of gimbal movement about the heading axis at a 1 to
1 ratio to the amplifier. The nominal electrical characteristics shall
be in accordance with table II. The synchro shall be internally excited
from A (see table I).
3.6.9.1 Synchro Rotation - The gimbals shall be positioned to obtain a
minimum voltage across pins 1 and 3 of table I, and then rotated in a
right-turn direction. The voltage from pin 1 to pin 2 shall increase
before decreasing.
12
|
|
Privacy Statement - Press Release - Copyright Information. - Contact Us |
